Въведение в системите за управление: работа, видове и приложения
Използвате системи за управление винаги, когато дадена машина автоматично поддържа постоянна стойност, като температура, скорост или ниво.Тази статия обяснява какво представлява системата за управление, как нейните части работят заедно и как обратната връзка поддържа изхода правилен.Ще видите и основните типове системи и как се държат при работа.Включени са общи употреби, предимства и ограничения.Каталог
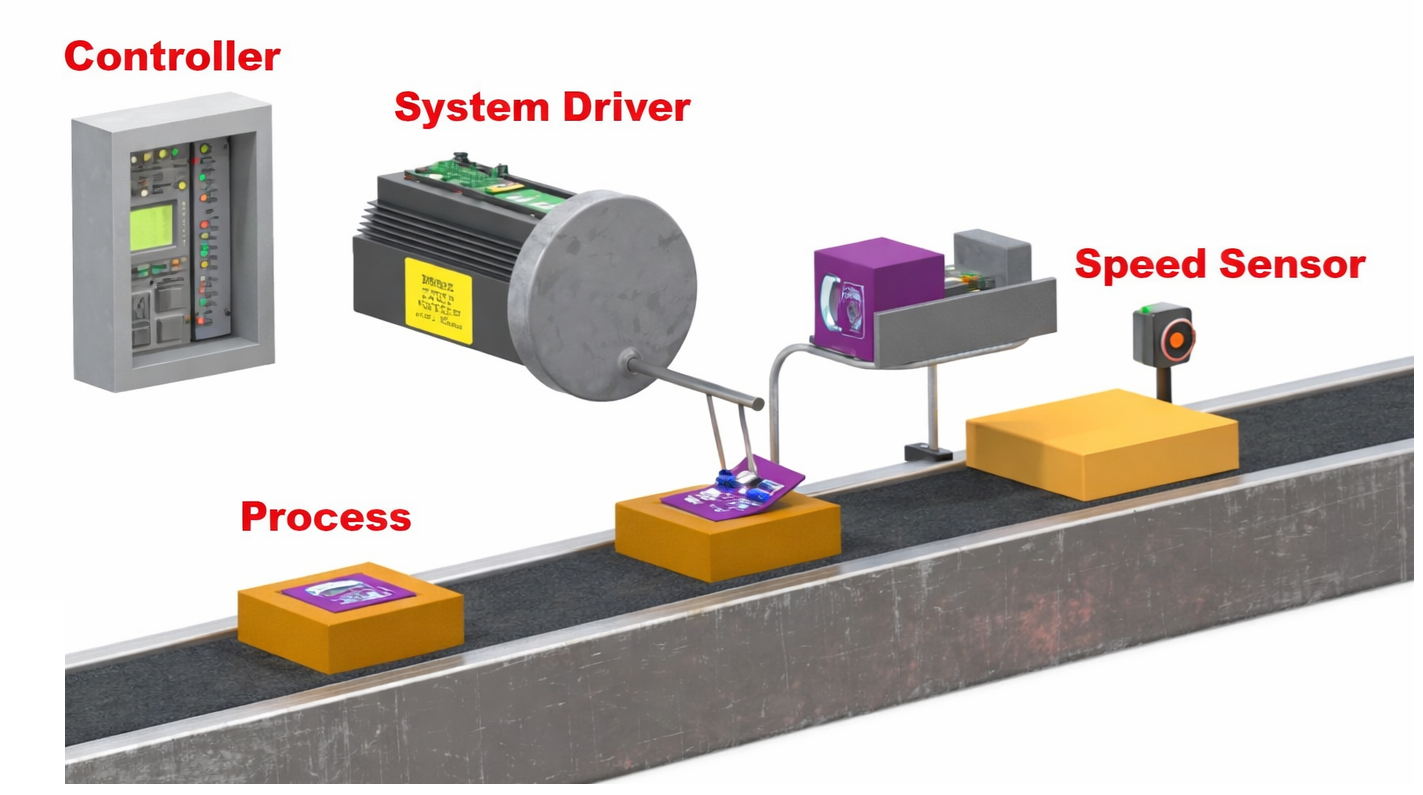
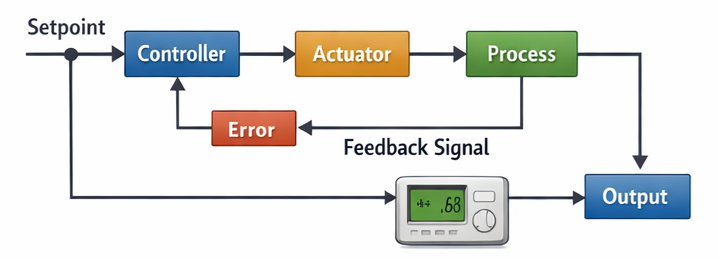
Фигура 1. Пример за система за управление
Какво е контролна система?
Системата за управление е система, която поддържа измерена стойност близо до желаната целева стойност.Целта му е автоматично да коригира процес, така че изходът да остане правилен дори когато условията се променят.Например, стаен термостат поддържа температурата близо до зададеното ниво, а автомобилният круиз контрол поддържа избраната скорост на автомобила.Контролерът за ниво на резервоара за вода също поддържа височината на водата на избрана маркировка.С прости думи, системата за управление непрекъснато проверява и коригира променлива, за да съответства на необходимата стойност.
Основни елементи на системата за управление
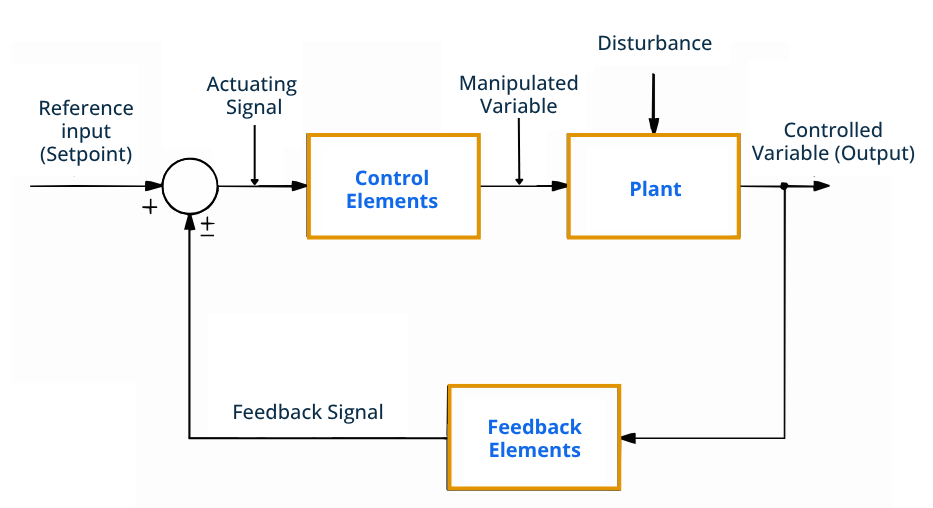
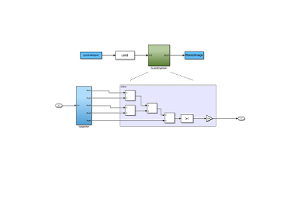
Фигура 2. Блокова схема на системата за управление
Системата за управление се състои от няколко стандартни части, всяка от които изпълнява определена задача.
• Референтен вход (зададена точка)
Това е желаната стойност, която системата се опитва да поддържа.Той представлява избраното целево условие.Системата винаги сравнява действителната стойност с тази справка.
• Задействащ сигнал
Това е сигналът, получен след сравняване на желаните и действителните стойности.Той показва колко корекция е необходима.Сигналът подготвя системата за корекция.
• Контролни елементи
Тези части управляват процеса на вземане на решения.Те определят коригиращото действие въз основа на получения сигнал.Резултатът от този етап подготвя процеса за настройка.
• Манипулирана променлива
Това е регулируемото количество, изпратено към процеса.Промяната на тази стойност влияе върху крайния резултат.Това е променливата, която системата може директно да променя.
• растение
Заводът е процесът, който се контролира.Той произвежда крайната изходна стойност.Системата има за цел да поддържа този изход на желаното ниво.
• Смущение
Това е нежелана промяна, засягаща процеса.Той може да отдалечи изхода от желаната стойност.Системата трябва да го компенсира.
• Контролирана променлива (изход)
Това е действително измереният резултат от процеса.Показва текущото състояние на системата.Целта е той да бъде равен на референтния вход.
• Елементи за обратна връзка
Те измерват изхода и изпращат информация обратно за проверка.Те осигуряват на системата текущото състояние.Това позволява да се определи корекция.
• Сигнал за обратна връзка
Това е върнатата информация за изходната стойност.Той представлява състоянието на процеса.Системата го използва за сравнение.
Принцип на работа на системата за управление
Фигура 3. Принцип на работа на системата за управление
Принципът на работа на системата за управление започва с подаване на желана входна стойност към системата.The system then compares this value with the actual output value.Разликата между тях се нарича сигнал за грешка.Ако грешката съществува, системата генерира коригиращ сигнал.This correction adjusts the process to reduce the error.The output changes and is checked again continuously.Цикълът се повтаря, докато резултатът съвпада точно с желаната стойност.
Характеристики на системите за управление
Control systems are evaluated based on how well they perform during operation.Тези характеристики описват качеството и надеждността на реакцията на системата.
|
Характеристики |
Описание |
|
Стабилност |
Изходът прави
не се разминават;се връща към постоянна стойност след смущение |
|
точност |
Крайна грешка ≤
±2–5% от зададената стойност |
|
Прецизност |
Изход
вариация ≤ ±1% при същия вход |
|
Време за реакция
|
Първоначално
реакцията възниква в рамките на измереното време на забавяне (td) |
|
Време за издигане |
Време от 10%
до 90% от крайната стойност |
|
Време за установяване |
Влиза и
остава в диапазона от ±2%. |
|
Превишаване |
Връх надвишава
крайна стойност по % сума |
|
Стационарно състояние
Грешка |
Константа
компенсация, оставаща след стабилизиране |
|
Чувствителност |
ΔИзход /
ΔКоефициент на промяна на параметъра |
|
Здравина |
Поддържа
работа въпреки промяната на смущенията |
|
Честотна лента |
Оперира
ефективно до -3 dB гранична честота |
|
Повторяемост |
Същият вход
произвежда същия резултат в рамките на толеранса |
|
Надеждност |
Оперира
без отказ за номинално време на работа (MTBF) |
|
Амортизиране |
трептене
затихване, определено от коефициента на затихване ζ |
|
Скорост на
Отговор |
Общо време до
достигнат стабилно състояние |
Видове системи за управление
Системите за управление се класифицират въз основа на начина, по който обработват информация, сигнали и поведение при реакция.Те са групирани според използването на обратна връзка, формата на сигнала и математическото поведение.
Система за управление с отворен цикъл
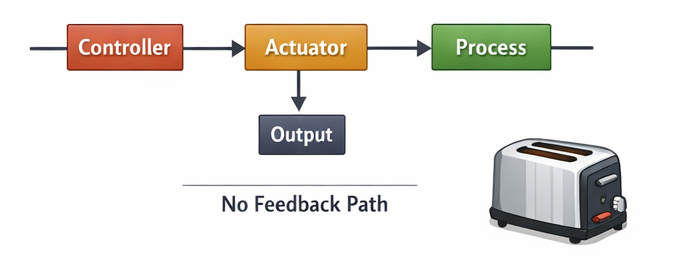
Фигура 4. Диаграма на системата за управление с отворен цикъл
Система за управление с отворена верига е система, при която изходът не влияе върху управляващото действие.Системата изпраща команда и приема, че резултатът е правилен, без да го проверява.Тъй като няма път за обратна връзка, той не може автоматично да коригира грешки или смущения.Ефективността зависи главно от правилното калибриране и работни условия.Тези системи са прости, евтини и лесни за проектиране.Промените в натоварването или околната среда обаче могат да повлияят на крайния резултат.Често срещаните примери включват таймер за електрически тостер, управление на таймера за перална машина и фиксиран таймер за напояване.
Система за управление със затворен цикъл
Фигура 5. Диаграма на системата за управление със затворен контур
Системата за управление със затворен цикъл е система, която използва обратна връзка, за да регулира автоматично своя изход.Системата измерва резултата и го сравнява с желаната стойност.Ако се появи разлика, се прилага корекция, за да се намали грешката.Тази непрекъсната настройка позволява точна и стабилна работа дори когато условията варират.Системите със затворен контур осигуряват по-добра прецизност и надеждност от системите с отворен контур.Те се използват широко в съвременни приложения за автоматично управление.Типичните примери включват контрол на температурата на климатика, круиз контрол на автомобила и автоматични регулатори на напрежението.
Система за управление с непрекъснато време
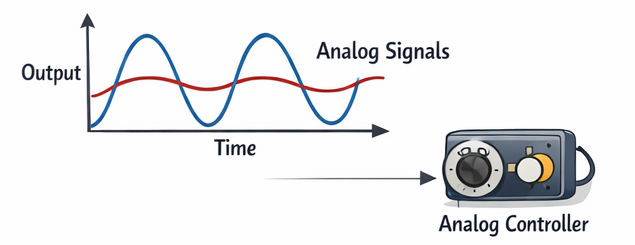
Фигура 6. Непрекъснат (аналогов) контролен сигнал
Система за непрекъснато управление обработва сигнали, които се променят плавно във времето.Входът и изходът съществуват във всеки момент без прекъсване.Тези системи обикновено работят с аналогови електрически или механични сигнали.Тъй като сигналите са непрекъснати, отговорът също е плавен и естествен.Системите с непрекъснато време обикновено се срещат в традиционните аналогови контролери.Подходящи са за физически процеси, изискващи незабавна реакция.Примерите включват аналогови регулатори на скоростта, контрол на звука на аудио усилвателя и контрол на позицията на хидравличния клапан.
Система за управление с дискретно време
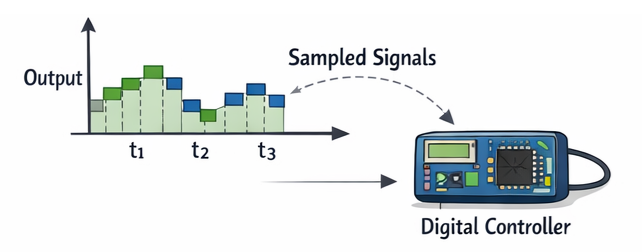
Фигура 7. Контролен сигнал с дискретно време (цифров).
Системата за управление с дискретно време работи, като използва сигнали за данни с дискретизация.Системата проверява и актуализира стойностите само на определени интервали от време.Тези сигнали обикновено се обработват от цифрови контролери или микропроцесори.Резултатът се променя стъпка по стъпка, а не непрекъснато.Такива системи позволяват програмируема работа и гъвкава настройка.Намират широко приложение в съвременното електронно и компютърно управление.Примерите включват базиран на микроконтролер контрол на температурата, цифров контрол на скоростта на двигателя и интелигентни домашни термостати.
Линейна система за управление
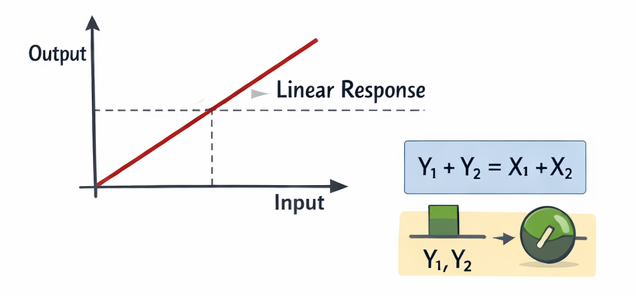
Фигура 8. Връзка вход-изход на линейна система
Линейната система за управление следва пропорционална връзка между входа и изхода.Ако входът се удвои, изходът също се удвоява при същите условия.Тези системи отговарят на принципа на суперпозиция, при който комбинираните входове произвеждат комбинирани изходи.Линейното поведение позволява предвидим и лесен математически анализ.Повечето теоретични проекти за управление предполагат линейна работа за опростяване.Линейните модели помагат при проектирането на стабилни и точни системи.Примерите включват електронни усилватели с малък сигнал и региони за управление на мотори с ниско натоварване.
Нелинейна система за управление
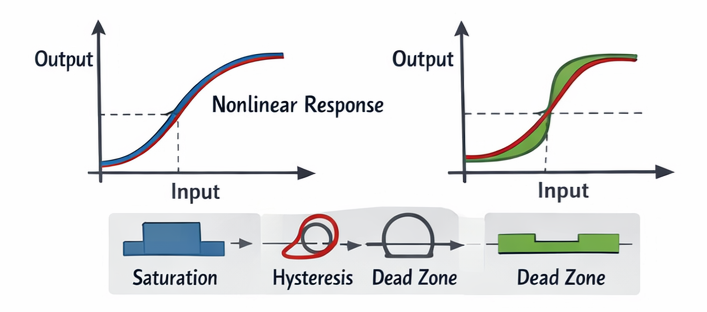
Фигура 9. Характеристики на реакцията на нелинейната система
Нелинейната система за управление има изход, който не е пропорционален на входа.Реакцията се променя в зависимост от работния обхват или условията.Малките промени на входа могат да доведат до големи вариации на изхода или изобщо да няма промяна.Често се появяват ефекти като насищане, хистерезис и мъртви зони.Тези системи са по-трудни за анализ, но представят физическите процеси по-точно.Много системи естествено се държат по нелинеен начин.Примерите включват ограничения на движението на роботизираната ръка, поведение на магнитния задвижващ механизъм и контрол на потока на клапана в крайни позиции.
Предимства и недостатъци на системите за управление
Системите за контрол подобряват последователността и намаляват ръчното усилие, но също така въвеждат сложност и разходи.
Предимства на системите за управление
• Системата поддържа изхода близо до необходимата стойност по време на работа.
• Не е необходимо операторите да настройват оборудването на ръка.
• Машините могат да работят дълги часове без често спиране.
• Системата автоматично коригира промените в условията.
• Работното състояние може да се проверява от панел или дистанционен дисплей.
Недостатъци на системите за управление
• Цената за настройка е по-висока от обикновените ръчни системи.
• Необходими са квалифицирани работници за настройка и обслужване.
• Сензорите и електронните части могат да се повредят с времето.
• Откриването на причината за проблемите може да отнеме повече време.
• Системата зависи от стабилно електрическо захранване.
Приложения на системи за управление
Системите за управление се използват както в промишлената автоматизация, така и в ежедневното оборудване, за да поддържат правилната работа автоматично.
1. Промишлено производство
Производствените машини поддържат постоянни размери и качество на продукта.Автоматизираните поточни линии използват регулиране, за да осигурят повторяемост.Това намалява отпадъците и подобрява ефективността.
2. Регулиране на температурата
Отоплителните и охладителни съоръжения поддържат комфортни условия на околната среда.Сградите разчитат на автоматично регулиране за стабилизиране на вътрешния климат.Това подобрява енергийната ефективност и комфорта.
3. Транспортни системи
Превозните средства използват контрол на скоростта и стабилността за по-плавна работа.Съвременните автомобили включват системи за круиз контрол и тракшън.Те подобряват безопасността и производителността при шофиране.
4. Енергийни системи
Електрическите мрежи регулират нивата на напрежение и честота.Генераторите регулират мощността, за да отговарят на търсенето на натоварване.Това гарантира стабилно електрозахранване.
5. Роботика и автоматизация
Роботите изпълняват прецизни задачи за позициониране и движение.Автоматизираните машини работят непрекъснато с висока точност.Това позволява усъвършенствано производство.
6. Медицинско оборудване
Устройствата поддържат контролирани работни условия по време на лечението.Оборудването за наблюдение поддържа стойностите в безопасни граници.Това подобрява безопасността и надеждността на пациента.
7. Домакински уреди
Ежедневните устройства автоматично управляват работните настройки.Пералните и хладилниците поддържат правилни работни условия.Това опростява ежедневните задачи.
8. Аерокосмически системи
Самолетите и дроновете поддържат стабилни условия за полет.Автоматичното насочване поддържа правилна ориентация и надморска височина.Това поддържа надеждна навигация.
Система за управление срещу автоматизация срещу вградени системи
Тези технологии са тясно свързани, но служат за различни инженерни цели в съвременните електронни и индустриални продукти.
|
Характеристика |
контрол
система |
Автоматизация |
Вграден
система |
|
Основен фокус |
Регулиране на
променливи |
Процес
изпълнение |
устройство
операция |
|
Цел |
Поддържайте
желаната стойност |
Изпълнявайте задачи
автоматично |
Бягайте посветен
функции |
|
Обхват |
Специфични
поведение на процеса |
цяла
работен процес
|
Неженен
устройство на продукта |
|
Решение
Възможност |
Въз основа на
измерени стойности |
Въз основа на
програмирана логика |
Въз основа на
фърмуер |
|
Използване на обратна връзка |
често
изисква се |
Не е задължително |
Не е задължително |
|
Тип хардуер |
Сензори и
изпълнителни механизми |
Машини и
контролери |
Микроконтролер
дъска |
|
Софтуерна роля |
Изчисляване
и корекция |
Секвениране
и координация |
устройство
контролна логика |
|
Тип отговор |
Непрекъснато
корекция |
Задача
изпълнение |
Функционална работа |
|
Размер на системата |
Малък до
среден |
Средно до
големи |
Много малък |
|
Гъвкавост |
Умерен |
високо |
Ограничен |
|
време
Изискване |
високо |
Умерен |
високо |
|
Приложение
Ниво |
Ниво на процеса |
Ниво на растението |
Продуктово ниво |
|
Пример |
температура
контрол |
Фабрика
производствена линия |
Смарт часовник |
|
Интеграция |
Част от
автоматизация |
Съдържа
системи за управление |
Поддържа и двете |
Заключение
Системите за управление поддържат стабилност чрез непрекъснато сравняване на действителния изход с целева стойност и коригиране на всяка грешка.Тяхното представяне зависи от основни елементи като обратна връзка, действие на контролера и контролиран процес.Различните класификации определят как се обработват сигналите и колко точно системата реагира на смущения.Благодарение на тези възможности, системите за управление намират широко приложение в промишлеността, транспорта, енергетиката, медицинските изделия и ежедневната техника.
За нас
ALLELCO LIMITED
Прочетете още
Бързо запитване
Моля, изпратете запитване, ние ще отговорим незабавно.
често задавани въпроси [FAQ]
1. Каква е разликата между контролер и система за управление?
Контролерът е само устройството за вземане на решения (като PLC или PID контролер).Системата за управление включва контролера плюс сензори, изпълнителни механизми и процеса, който се регулира.
2. Какво е PID управление и защо е важно?
PID контролът използва пропорционални, интегрални и производни действия за минимизиране на грешките бързо и плавно.Той подобрява стабилността, точността и скоростта на реакция в повечето индустриални системи.
3. Защо системите за управление понякога осцилират или ловуват?
Колебания възникват, когато корекциите са твърде агресивни или забавени.Лошата настройка, бавните сензори или прекомерното усилване причиняват многократно превишаване на изхода.
4. Какво е насищане на задвижващия механизъм?
Насищането на задвижващия механизъм се случва, когато задвижващият механизъм достигне своята физическа граница и не може да увеличи мощността допълнително.Това не позволява на системата да коригира големи грешки.
5. Как системите за контрол се справят със закъсненията в процесите?
Те използват методи за настройка, филтри или предсказуеми алгоритми, за да компенсират забавянето, така че корекцията да се случи в точното време.

Ръководство за резистор 4,7 kΩ: Цветов код, употреби, тестване и сравнение на стойности
на 2026/02/16

Миниатюрен прекъсвач (MCB): принцип на работа, типове, рейтинги и ръководство за избор
на 2026/02/15
Популярни публикации
-

Компютри на сложни инструкции: Как промениха изчисленията?
на 8000/04/17 147713
-

USB-C Pinout и функции
на 2000/04/17 111721
-
Използване на Xilinx Unified Simulation Primitives: Изчерпателно ръководство за FPGA дизайн и симулация
на 1600/04/17 111322
-
Захранващи напрежения в електрониката: Значение на VCC, VDD, VEE, VSS и GND
на 0400/04/17 83606
-

Ръководство за конектор RJ45: Pinout, окабеляване, видове кабели и употреби
на 1970/01/1 79257
-

Крайното ръководство за цветни кодове в съвременните електрически системи
Начинът, по който нашите електрически системи използват цветове, не е само за външен вид.Всеки цвят на проводника сега показва специфична функция, което улеснява идентифицирането и обработката на е...на 1970/01/1 66775
-

Качество (Q) Фактор: Уравнения и приложения
Коефициентът на качество, или „Q“, е важен при проверка на това колко добре работят индуктори и резонатори в електронни системи, които използват радиочестоти (RF).'Q' измерва колко добре веригата с...на 1970/01/1 62944
-

Ръководство за клапа на чист: функция, симптоми, тестване и подмяна на оптимална работа на двигателя
Клапанът на чистката е ключова част от системата на автомобила, която помага да се поддържа чистият въздух, като управлява изпаренията на горивото, преди да могат да избягат в атмосферата.Това не с...на 1970/01/1 62820
-
Постигане на пикова ефективност с теоремата за максимален трансфер на мощност
Теоремата за максимален пренос на мощност обяснява как енергия от източник, като батерия или генератор, преминава към свързан товар.Той показва точното състояние, при което товарът получава най -мн...на 1970/01/1 54028
-

Спецификации и съвместимост на батерията A23
Батерията A23 е малка батерия с форма на цилиндър с високо напрежение.Нарича се още 23A, 23AE или MN21, той работи на 12 волта и много по -високо от батериите на AA или AAA.Специалният му ...на 1970/01/1 51982
Номер на гореща част
-

TOP245Y
Power Integrations
IC OFFLINE SW FLYBACK TO220-7C
MAX4582CUE
Analog Devices Inc./Maxim Integrated
IC SWITCH SP4T X 2 80OHM 16TSSOP
FST3383WMX
onsemi
IC BUS FET EXCH SW 5 X 2:2 24SOP
RT9161-25GX
Richtek USA Inc.
IC REG LINEAR 2.5V 300MA SOT89-3
NL17SZ02XV5T2
onsemi
IC GATE NOR 1CH 2-INP SOT553
FAN1117AD18X
onsemi
IC REG LINEAR 1.8V 1A DPAK
CM50TU-24H
Powerex Inc.
IGBT MOD 1200V 50A 400W
RC0201JR-0736KL
YAGEO
RES 36K OHM 5% 1/20W 0201
MAX1247ACEE+
Analog Devices Inc./Maxim Integrated
IC ADC 12BIT SAR 16QSOP
LT3093IMSE#PBF
Analog Devices Inc.
IC REG LIN NEG ADJ 200MA 12MSOP
ATMEGA168PA-AU
Atmel
IC MCU 8BIT 16KB FLASH 32TQFP
DSC7Q01R0L
Panasonic Electronic Components
TRANS NPN DARL 80V 1A MINIP3
TLVH431AIL5T
STMicroelectronics
IC VREF SHUNT ADJ 0.5% SOT23-5
08052A9R1BAT2A
KYOCERA AVX
CAP CER 9.1PF 200V NP0 0805
TPS65012RGZRG4
Texas Instruments
IC BATT MFUNC LI-ION 1CEL 48VQFN
TVP3010-135MGA
Texas Instruments
PALETTE DAC, 1600 X 1280 PIXELS
SY100EP32VZG
Microchip Technology
IC DIVIDER BY 2 1-BIT 8SOIC
HFA15TB60
Vishay General Semiconductor - Diodes Division
DIODE GEN PURP 600V 15A TO220AC -
CC0603CRNPO9BN3R3
YAGEO
CAP CER 3.3PF 50V C0G/NPO 0603
UCC3889DTR
Texas Instruments
IC OFFLINE SWITCH FLYBACK 8SOIC
IXTA170N075T2
IXYS
MOSFET N-CH 75V 170A TO263
ISL62392CHRTZ-T
Renesas Electronics America Inc
IC PWR SUPPLY CTRLR 28TQFN
0603ZC272MAT2A
KYOCERA AVX
CAP CER 2700PF 10V X7R 0603
74AC161SJX
onsemi
IC BINARY COUNTER 4-BIT 16SOP
IRL1404SPBF
International Rectifier
HEXFET POWER MOSFET
AC0805KRX7R9BB104
YAGEO
CAP CER 0.1UF 50V X7R 0805
MC33269DTRK
onsemi
IC REG LDO 0.8A ADJOUT DPAK
1792757
Phoenix Contact
TERM BLOCK PLUG 2POS 5.08MM
XVF3500-FB167-C
XMOS
IC MCU 32BIT 2MB FLASH 167FBGA
08052C682MAT2A
KYOCERA AVX
CAP CER 6800PF 200V X7R 0805
ADS5525IRGZR
Texas Instruments
IC ADC 12BIT PIPELINED 48VQFN
GF1G-E3/5CA
Vishay General Semiconductor - Diodes Division
DIODE GEN PURP 400V 1A DO214BA
AD8130AR
Analog Devices Inc.
IC OPAMP DIFF 1 CIRCUIT 8SOIC
ATMEGA88-15AT
Microchip Technology
IC MCU 8BIT 8KB FLASH 32TQFP
MC35XS3400DPNA
NXP USA Inc.
IC PWR SWITCH N-CHAN 1:4 24PQFN
TC4427VOA
Microchip Technology
IC GATE DRVR LOW-SIDE 8SOIC -

MAX1745EUB/V+
Analog Devices Inc./Maxim Integrated
HIGH-VOLTAGE, STEP-DOWN DC-DC CO
STP20NM50FP
STMicroelectronics
MOSFET N-CH 550V 20A TO220FP
89HMPEB383ZBEMG
Renesas Electronics America Inc
IC INTERFACE SPECIALIZED 128QFP
RB162VAM-20TR
Rohm Semiconductor
DIODE SCHOTTKY 20V 1A TUMD2M
BU6375FV-E2
Rohm Semiconductor
IC MCU 8BIT SSOP
TLC5920DLR
Texas Instruments
IC LED DRIVER LINEAR 30MA 48SSOP
GC2011A-PQ
Texas Instruments
IC FILTER DIGITAL 160QFP
NFP0QSN112HL2D
Murata Electronics
CMC 100MA 90 OHM SMD
MIC5207-1.8YM5-TR
Microchip Technology
IC REG LINEAR 1.8V 180MA SOT23-5
CAT34C02HU3I-GT4
onsemi
IC EEPROM 2KBIT I2C 400KHZ 8UDFN
LM2673SDX-3.3
Texas Instruments
IC REG BUCK 3.3V 3A 14VSON
TPS3808G33DBVRG4
Texas Instruments
IC SUPERVISOR 1 CHANNEL SOT23-6
MBRF15100CT
SMC Diode Solutions
DIODE ARRAY SCHOTTKY 100V ITO220
AD8620BRZ-REEL7
Analog Devices Inc.
IC OPAMP JFET 2 CIRCUIT 8SOIC
MMBZ15VDLT1G
onsemi
TVS DIODE 12.8VWM 21.2VC SOT23-3
DZ2J110M0L
Panasonic Electronic Components
DIODE ZENER 11V 200MW SMINI2
MIC3223YTSE
Microchip Technology
IC LED DRV RGLTR PWM 16TSSOP
DSC1123CI1-027.0000
Microchip Technology
MEMS OSC XO 27.0000MHZ LVDS SMD